




Rachel’s Jump North
Rachel Freire is visiting us for a week of residency/collaboration, as well as presenter on our first Shoptalk discussion on “how we know what we want”.
Rachel is developing her own modular jumpsuit collection which will be released in three levels:
1) download open source patterns to make your own
2) order custom assembled version from a local maker near you
3) order a standard or bespoke version as a commission to Rachel Freire
Rachel’s Commission
We offered Rachel that she could commission a custom version of her own jumpsuit from KOBA and that the customization specialization we offer in wearable technology. Rachel decided she wanted a version of the “Northbelt” built in to her jumpsuit that would allow her to always sense where north is. Jumping triggers the north-mode on and off. When you sit still for too long the belt will start to “purr”, waking you up, encouraging you to move as a travel companion might, or relaxing you as it causes you to focus on the sensation.
Flickr set: https://www.flickr.com/photos/plusea/albums/72157691507093604

NOTES
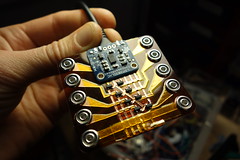
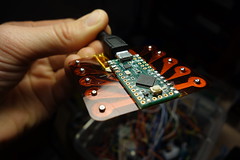
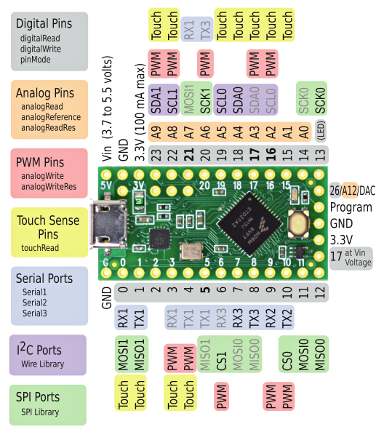
To use ATtiny84 or a Teensy?
– Teensy has on-board USB socket, easy to power and re-program over this connection, hast more dominant aesthetic….
– ATtiny is small and neat and cheap….
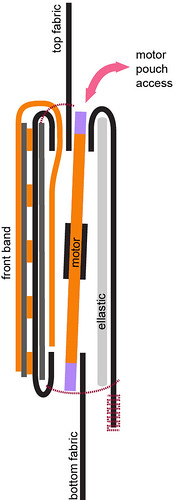
Waistband circuit:

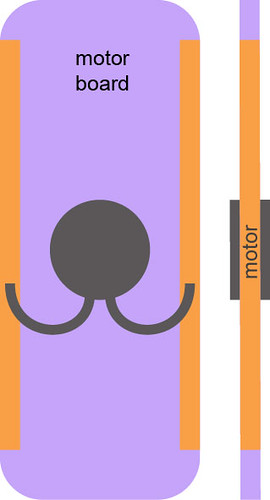
Motor boards and waistband layering:
Compass (LSM303DLHC)
Adafruit Triple-axis Accelerometer + Magnetometer (Compass) Board
https://learn.adafruit.com/lsm303-accelerometer-slash-compass-breakout?view=all
Possibly with an ATtiny84
>> https://github.com/Dronetech/Tiny_LSM303
>> http://blog.dronetech.eu/attiny85-lsm303-library/
MOSFET (IRLML 2402, NMOS LL 20V 1A SOT23)
IRLML 2402 Datasheet >> https://www.infineon.com/dgdl/irlml2402.pdf?fileId=5546d462533600a401535664da7925f6
“Low-side – i.e. a N-channel MOSFET is used, and the drive signal is active-high. N-channel MOSFETs generally have a lower on-resistance and therefore where there is enough drive voltage to be sure of putting the MOSFET in the saturated region it will be more efficient. Plus, N-channels are generally cheaper!”
>> https://www.precisionmicrodrives.com/application-notes/ab-001-discrete-driver-circuits-for-vibration-motors
Circuit
TEENSY PINOUT FLEXPCB VERSION:
LB—|3 14|— CB
L —|2 15|— RB
LF—|1 16|— R
CF—|0 17|— RF
18|— SDA
btn–|11 19|— SCL
—-|VCC VCC|—
Relative to the belt position on the garment:
CF (Center Front), RF (Right Front), R (Right), RB (Right Back), CB (Center Bak), LF (Left Back), L(Left), LF(Left Front)
here is the current code, which is based on the original north belt code
https://github.com/mikst/jumpNorth
Steps:
cut jumpsuit pattern which will include waistband piece
fuse fusible to copper fabric
cut copper traces (4mm wide, as long as possible)
trace circuit lines to front of outer waistband piece
fuse copper traces to outer waistband piece
add interfacing as insulation to back of outer waistband piece where motors lines jump across
Northbelt uses LSM303 module, which is also:
Triple-axis Accelerometer+Magnetometer (Compass) Board – LSM303
https://www.adafruit.com/product/1120
datasheet: https://cdn-learn.adafruit.com/downloads/pdf/lsm303-accelerometer-slash-compass-breakout.pdf
this one is more:
Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout – BNO055
https://www.adafruit.com/product/2472
Sparkfun has this rather expensive compass:
https://www.sparkfun.com/products/12916
Segor:
XYZ-Magnetometer 3,3V/5V, I2C, m.HMC5883L, Honeywell
http://www.segor.de/#Q=Kompass-Modul3%252C3%252F5V&M=1
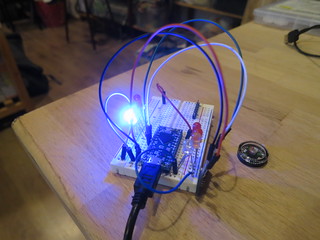
Breadboard prototype:
We started off with the northbelt code by David Singleton
https://github.com/dps/northbelt
TEENSY PINOUT PROTOBOARD VERSION:
————-
—|23 1|—
—|20 0|—
—|21/22 3/4|—
—|17/18 7/8|—
—|GND GND|—
————-
PIN –> HEADING:
1 – SOUTH/WEST
0 – WEST
3/4 – NORTH/WEST
7/8 – NORTH
17/18 – NORTH/EAST
21/22 – EAST
20 – SOUTH/EAST
23 – SOUTH
References
Northbelt
https://github.com/dps/northbelt
https://www.engadget.com/2009/02/09/haptic-compass-gives-you-sense-of-direction-not-style/

